

在计算机编程领域,尤其是在使用 C 语言进行科学计算和数据处理时,常常会遇到需要求解矩阵逆的情况,矩阵的逆在众多数学和工程应用中具有重要的地位,它能够帮助我们解决线性方程组、优化问题以及许多其他涉及矩阵运算的复杂任务。
让我们来了解一下什么是矩阵的逆,如果一个矩阵 A 乘以另一个矩阵 B 的结果是单位矩阵(即一个对角线上元素为 1,其余元素为 0 的矩阵),那么矩阵 B 就是矩阵 A 的逆,用数学表达式表示为:A * B = B * A = I,I 是单位矩阵。

在 C 语言中,要实现矩阵求逆的功能,通常需要借助一些数学库或者自己编写相应的算法,如果使用数学库,例如常见的 GSL(GNU Scientific Library)库,它提供了一系列方便的函数来处理矩阵运算,包括求逆,使用这样的库可以大大简化编程的难度,但需要在编译和链接时正确配置相关的库文件。
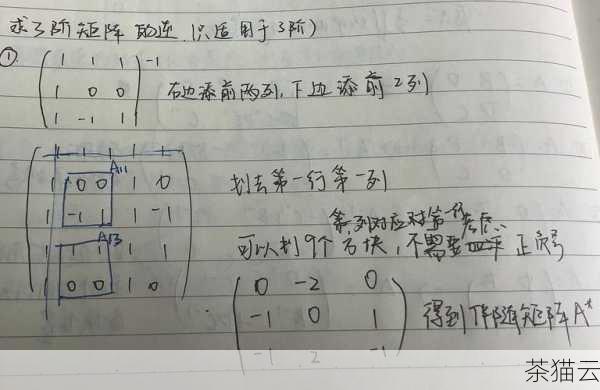
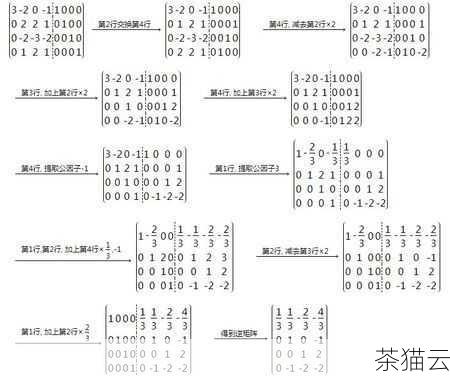
如果选择自己编写算法来求解矩阵的逆,一种常见的方法是使用高斯-约旦消元法,这种方法的基本思想是通过一系列的行变换将矩阵化为单位矩阵,同时对单位矩阵进行相同的变换,最终得到的变换后的单位矩阵就是原矩阵的逆。
以下是一个使用高斯-约旦消元法求矩阵逆的简单 C 语言示例代码:

#include// 交换矩阵的两行 void swapRows(double **matrix, int row1, int row2, int cols) { double *temp = matrix[row1]; matrix[row1] = matrix[row2]; matrix[row2] = temp; } // 对矩阵进行行变换,使主对角线上的元素为 1 void makePivotOne(double **matrix, int pivotRow, int cols) { double pivotValue = matrix[pivotRow][pivotRow]; for (int j = 0; j < cols; j++) { matrix[pivotRow][j] /= pivotValue; } } // 消去非主对角线上的元素 void eliminate(double **matrix, int pivotRow, int cols) { for (int i = 0; i < cols; i++) { if (i!= pivotRow) { double factor = matrix[i][pivotRow]; for (int j = 0; j < cols; j++) { matrix[i][j] -= factor * matrix[pivotRow][j]; } } } } // 求矩阵的逆 void inverse(doublematrix, doubleinverseMatrix, int n) { // 初始化逆矩阵为单位矩阵 for (int i = 0; i < n; i++) { for (int j = 0; j < n; j++) { if (i == j) { inverseMatrix[i][j] = 1; } else { inverseMatrix[i][j] = 0; } } } for (int i = 0; i < n; i++) { makePivotOne(matrix, i, n); makePivotOne(inverseMatrix, i, n); eliminate(matrix, i, n); eliminate(inverseMatrix, i, n); } } // 打印矩阵 void printMatrix(double **matrix, int rows, int cols) { for (int i = 0; i < rows; i++) { for (int j = 0; j < cols; j++) { printf("%f ", matrix[i][j]); } printf("\n"); } } int main() { int n = 3; double matrix[3][3] = {{1, 2, 3}, {0, 1, 4}, {5, 6, 0}}; double inverseMatrix[3][3]; doubleptrMatrix = (double)malloc(n * sizeof(double *)); doubleptrInverseMatrix = (double)malloc(n * sizeof(double *)); for (int i = 0; i < n; i++) { ptrMatrix[i] = matrix[i]; ptrInverseMatrix[i] = inverseMatrix[i]; } inverse(ptrMatrix, ptrInverseMatrix, n); printf("原始矩阵:\n"); printMatrix(ptrMatrix, n, n); printf("逆矩阵:\n"); printMatrix(ptrInverseMatrix, n, n); free(ptrMatrix); free(ptrInverseMatrix); return 0; }
上述代码实现了一个简单的高斯-约旦消元法求矩阵逆的程序,需要注意的是,这个示例代码仅适用于方阵,并且在实际应用中,还需要考虑矩阵是否可逆、数值稳定性等问题。

我们来解答一些与 C 语言求矩阵逆相关的问题:

问题 1:如果矩阵不可逆,在 C 语言中如何判断?
答:一种常见的方法是计算矩阵的行列式,如果行列式的值为 0,则矩阵不可逆,在上述示例代码中,没有包含判断矩阵是否可逆的部分,如果要添加,可以在求逆之前计算矩阵的行列式。

问题 2:求矩阵逆的算法复杂度是多少?
答:高斯-约旦消元法的时间复杂度通常为 O(n^3),n 是矩阵的阶数,这是因为在消元过程中,需要对矩阵的每一行和每一列进行操作。
问题 3:除了高斯-约旦消元法,还有其他求矩阵逆的方法吗?

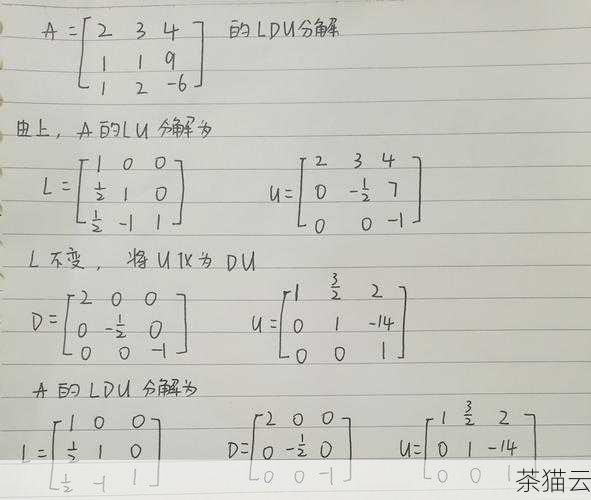
答:还有 LU 分解法、QR 分解法等,这些方法在不同的场景下可能具有不同的优势,具体的选择取决于问题的特点和性能要求。

评论已关闭